Ci siamo fatti l'idea che la ricerca nel settore della robotica tenda a produrre macchine che assomiglino sempre più a esseri umani. E questo è vero per molti filoni di ricerca, ma altri vanno in tutt'altra direzione.
E' il caso di un gruppo di ricercatori dell'università di Harvard, che stanno sperimentando la realizzazione di piccoli robot, delle dimensioni di un insetto, e che di un insetto dovrebbero avere alcune capacità, in particolare quella di posarsi sulle pareti o sul soffitto.
E' facile intuire quali potranno essere i campi applicativi: piccole apparecchiature spia in grado di sorvegliare un ambiente restando appese al soffitto o piccoli droni in grado di effettuare misurazioni scientifiche in contesti altrimenti difficilmente raggiungibili.
Il problema che questa ricerca sta cercando di risolvere sta nel fatto che un robot per volare richiede molta energia e questo implica un rapido consumo della batteria, che in apparecchiature come queste è per forza di cose di piccole dimensioni.
La soluzione potrebbe essere appunto quella di risparmiare energia, imitando il comportamento di un'ape o di una farfalla che, spostandosi in volo, ogni tanto si fermano su una parete o sul soffitto per, poi, ripartire di nuovo.
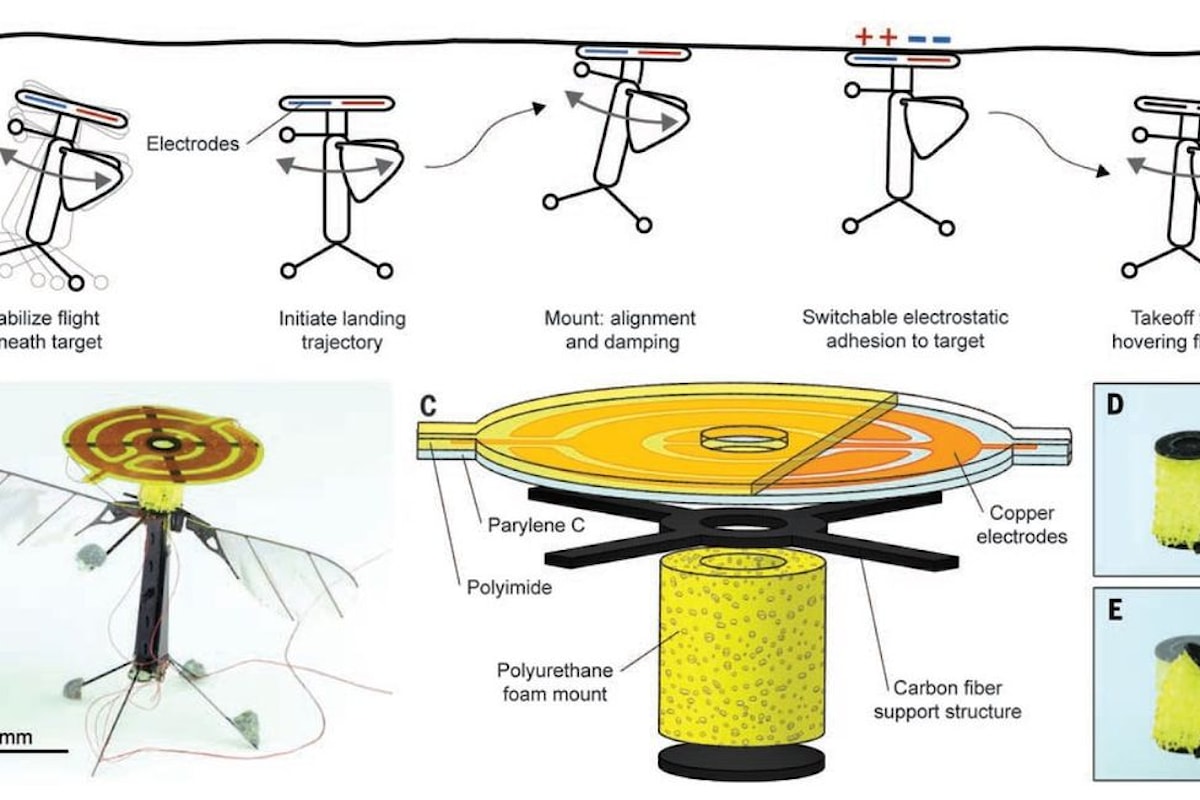
A questo scopo, il MAV (Micro Aerial Vehicle), come è stato chiamato il piccolo robot, è stato dotato di un disco con una base in fibra di carbonio, degli elettrodi di rame ed un rivestimento poliamidico, posato su un cilindro di schiuma di poliuretano che serve ad attutire l'impatto al momento dell'atterraggio.
Una volta caricato di corrente elettrostatica, il disco può aderire a qualsiasi superficie che risponde all'elettricità statica (legno, vetro materiale organico).
Il robot, collegato durante i test ad un alimentatore per consentire ai ricercatori di fornire energia al disco elettrostatico ed al motore, si comporta esattamente come un insetto, controllando la velocità in modo da rallentare e rimanere fermo in aria, prima di atterrare dolcemente.
Ovviamente, quello che forse impropriamente definiamo atterraggio può avvenire su una superficie che sta sopra o sotto il robot, oppure parallela rispetto alla direzione di volo.
E' importante sottolineare che il consumo di energia richiesto per rimanere appeso ad una parete è inferiore di parecchi ordini di grandezza rispetto a quello richiesto per il volo. L'utilizzo della corrente elettrostatica fa sì che la forza di adesione, e quindi il peso supportato, sia proporzionale alla superficie del disco.
L'utilizzo della corrente elettrostatica in questo ambito di ricerca non è nuovo, ma la soluzione adottata in questo caso è particolarmente interessante, perché non comporta l'utilizzo di parti mobili e, quindi, l'atterraggio ed il decollo non esercitano nessuna pressione sulla superficie interessata.


