OMP Y7 VRO integrata con Y7 per permettere la visualizzazione in tempo reale di oggetti e individui analizzati dall'intelligenza artificiale e replicati direttamente all'interno delle VRO.
L'incrocio di queste tecnologie, oggi denominate OPM Y7, permette di poter replicare in tempo reale all'interno di un ambiente immersivo con tecnologia sistemica vro una scena che si sta sviluppando realmente nel mondo reale.
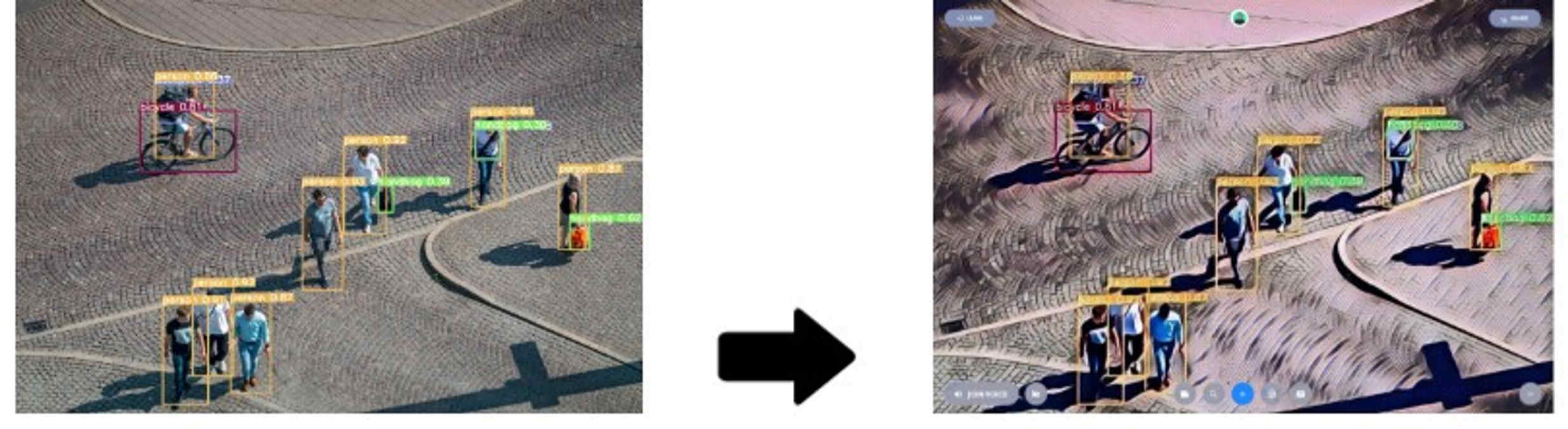
L’intelligenza artificiale per il riconoscimento di oggetti analizza la scena reale, e la invia alla VRO che la riproduce fedelmente ed in tempo reale.
Quindi potremmo essere partecipanti invisibili nella realtà in un contesto anche solo a carattere di osservazione per poi poter intervenire in maniera reale sfruttando l'analisi della scena e della situazione replicata dalla vro in tempo reale ove l’operatore è presente ma a distanza.
I campi di applicazione di questo innesto sistemico della tecnologia OMP Y7 all'interno della programmazione della vroVRO saranno molteplici, potremmo per esempio essere presenti in contesti all'interno dei quali ci sono molte persone come manifestazioni assembramenti e visualizzare i comportamenti e i movimenti delle stesse potendosi muovere in una rappresentazione immersiva tridimensionale ma rimanendo a distanza; questo per esempio potrebbe essere molto utile per gli operatori di sicurezza per controllare il corretto svolgimento di eventi e manifestazioni e poi poter intervenire in maniera diretta e immediata per affrontare qualsiasi necessità.
Il ritardo rispetto al verificarsi dell'evento e quindi dell'azione che i soggetti o gli oggetti all'interno dell'acquisizione dell'intelligenza artificiale svolgono sarà all'incirca di 0,1 millisecondi, questo permette di fatto una risposta pressoché immediata da parte dell'operatore che è connesso ma distante.
Proviamo a immaginare la possibilità per esempio per i camionisti di teleguidare in tempo reale i loro mezzi a distanza comodamente seduti nel loro ufficio nella loro casa, l’OPM Y7 analizza la realtà tramite le telecamere sensorizzate montate sui mezzi e riproduce ciò che riscontra a 360 gradi in modalità immersiva in VRO permettendo all’operatore di trasmettere comandi al sistema di guida dei veicolo.
Massimiliano Nicolini, sviluppatore di questa integrazione sistemica e direttore del dipartimento di ricerca e sviluppo di olimaint e principal members del metaverse standard forum ci offre il suo punto di vista:"Credo che questa sia un’integrazione ulteriore di una tecnologia Open di intelligenza artificiale come la versione OPMY7 che ci permetterà di poter ampliare la gamma di servizi di opportunità che la metodologia sistemica della VRO basata sul sistema operativo sul protocollo XPL potrà in futuro offrire, quindi realizzando degli scenari all'interno dei quali non è solo il protagonista principale ad essere replicato ma è anche tutto lo scenario che gli sta intorno e quindi, per esempio entrare in applicazioni più divertenti, potremmo serenamente andare a vedere una partita di calcio seduti in prima fila o addirittura in panchina senza disturbare nessuno e godendoci la partita da una visuale praticamente unica che solo pochi fortunati ad oggi possono avere".


